 最小椭圆覆盖
最小椭圆覆盖
给 个平面上的点,求最小面积覆盖的椭圆。题目出处是 NJUCS 机试的第二题(是保研的机试)(“我们的本科教育出了很大的问题”)https://zhuanlan.zhihu.com/p/1946176384578856692 (opens new window)。
第一眼:由于 n 非常小,完全可以枚举所有 5 个点。我们知道圆锥曲线一般式 ,直接设 A=1,把 5 个点代入就变成线性方程,高斯消元即可。但是问题恰恰不在 5 个点的情况,如果最优解的椭圆穿过 4 个点呢?3 个点呢?这样的椭圆就无法直接确定,变成难度更大的最优化问题,对于我这种人非常不友好。
因此这题想要快速完成,只能用类似梯度下降的算法做,这里采用最简单的爬山算法。我们可以把椭圆的圆心、长轴、短轴、旋转角度这些变量组成 5 维向量,在 5 维空间里随机游走。如果椭圆不包含所有点就撤销,如果椭圆面积比之前大也撤销。
另一个更好的做法就是文章里的,只要求一个最优的线性变换,在这个线性变换下求最小圆覆盖。这样就是 2 维空间随机游走了(因为只需要一个方向的缩放和剪切,其他的不影响椭圆面积),理论上效果会更好。
理论可行,实践开始。
我们要实现的是 Point 类,顺便把线性变换实现了:
struct Point {
scalar_t x;
scalar_t y;
// 向量加、减、标量乘、点积、叉积等函数
// 这是线性变换
static Point linear_transform(Point p, Point basis_x, Point basis_y) {
return Point{basis_x.x * p.x + basis_y.x * p.y,
basis_x.y * p.x + basis_y.y * p.y};
}
};
Circle 类,这里实现最小圆覆盖需要的外接圆算法:
struct Circle {
Point center;
scalar_t radius;
// 2 个点的外接圆算法(就是给定直径画圆)
static Circle circumcircle(Point a, Point b) { /*...*/ }
// 3 个点的外接圆算法
static Circle circumcircle(Point a, Point b, Point c) { /*...*/ }
};
然后是最小圆覆盖算法:
Circle RIA(std::span<Point> a) {
/*这里是三个 for 循环*/
}
爬山算法,我假设只改变基向量 basis_x,且只限制 basis_x 在 y 轴右边(就是下面代码里的 std::max),这样避免出现无穷大:
Point basis_x{1, 0};
Point basis_y{0, 1};
scalar_t step = 1e9;
auto [circle, area] = calc(points, basis_x, basis_y);
std::uniform_real_distribution<double> uniform(-1, 1);
while (step > eps) {
Point new_basis_x{std::max(basis_x.x + uniform(generator) * step, eps),
basis_x.y + uniform(generator) * step};
Point new_basis_y = basis_y;
auto [new_circle, new_area] = calc(points, new_basis_x, new_basis_y);
if (area > new_area) {
circle = new_circle;
area = new_area;
basis_x = new_basis_x;
basis_y = new_basis_y;
}
step *= 0.999;
}
到这里就算题目是做完了,一共 130 行代码。要考试中完成这个过程,已经不是我能想象的强了。
最终效果:
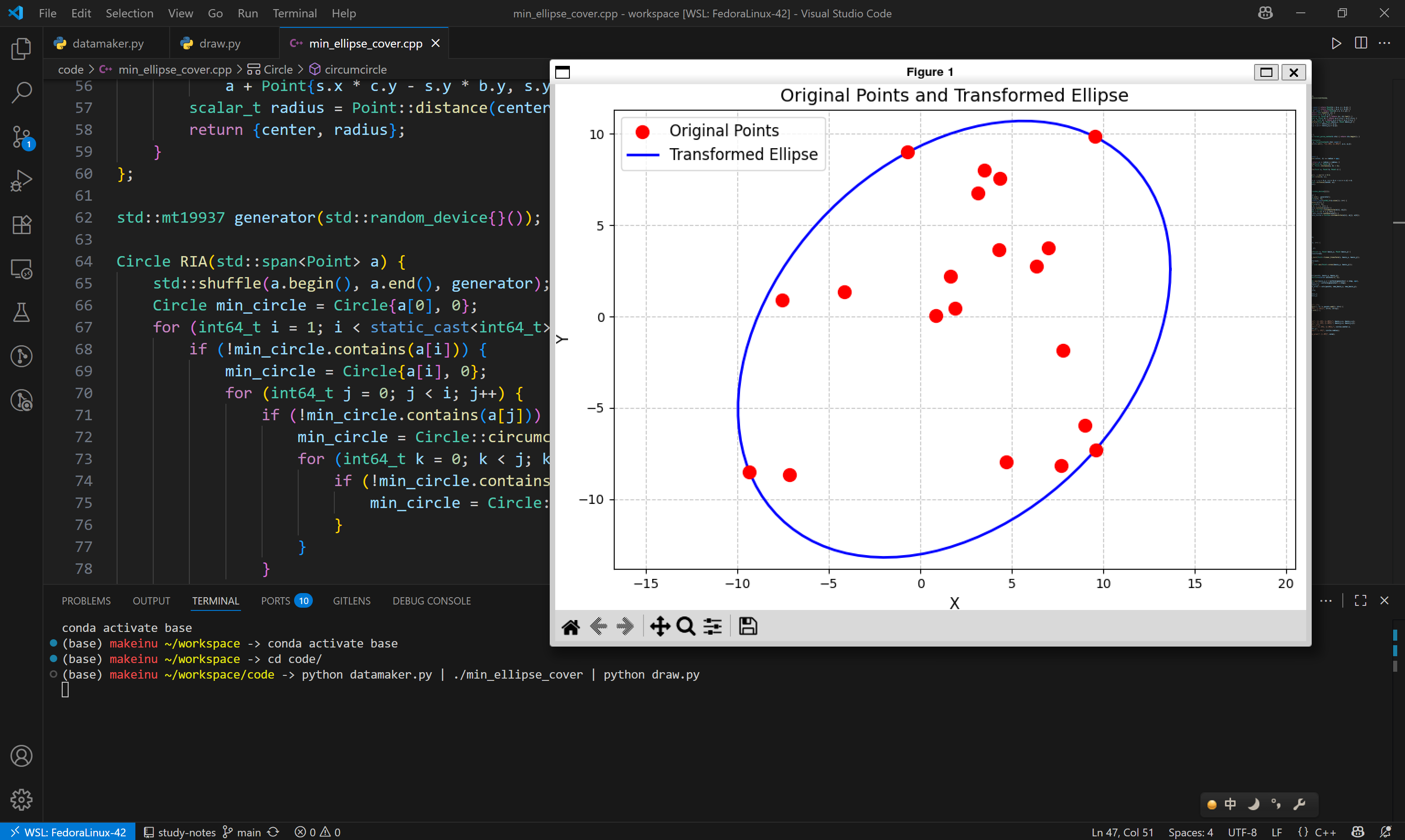
有个有意思的点是,3 个点的情况正好是线性变换到正三角形,画一个圆,再线性变换回来。
后来我想把结果可视化一下,问了一下 AI。AI 说把圆逆线性变换到椭圆需要特征值分解,又是我不会的数学,只好让 AI 写代码。可是 DeepSeek 老师怎么写都不对,浪费了好多时间。
最后贴代码:
min_ellipse_cover.cpp
#include <algorithm>
#include <cmath>
#include <iostream>
#include <print>
#include <random>
#include <span>
#include <vector>
using scalar_t = double;
constexpr scalar_t eps = 1e-9;
constexpr scalar_t pi = 3.141592653589793238;
struct Point {
scalar_t x;
scalar_t y;
Point operator-(Point b) const { return Point{x - b.x, y - b.y}; }
Point operator+(Point b) const { return Point{x + b.x, y + b.y}; }
Point operator*(scalar_t k) const { return Point{k * x, k * y}; }
scalar_t len() const { return std::hypot(x, y); }
scalar_t sqr() const { return x * x + y * y; }
static scalar_t distance(Point a, Point b) { return (a - b).len(); }
static scalar_t cross(Point a, Point b) { return a.x * b.y - a.y * b.x; }
static scalar_t dot(Point a, Point b) { return a.x * b.x + a.y * b.y; }
static Point linear_transform(Point p, Point basis_x, Point basis_y) {
return Point{basis_x.x * p.x + basis_y.x * p.y,
basis_x.y * p.x + basis_y.y * p.y};
}
};
struct Circle {
Point center;
scalar_t radius;
bool contains(Point b) const {
return Point::distance(center, b) <= radius + eps;
}
scalar_t area() const { return pi * radius * radius; }
static Circle circumcircle(Point a, Point b) {
return {(a + b) * 0.5, Point::distance(a, b) / 2};
}
static Circle circumcircle(Point a, Point b, Point c) {
b = b - a;
c = c - a;
Point s = Point{b.sqr(), c.sqr()} * 0.5;
scalar_t d = 1 / Point::cross(b, c);
Point center =
a + Point{s.x * c.y - s.y * b.y, s.y * b.x - s.x * c.x} * d;
scalar_t radius = Point::distance(center, a);
return {center, radius};
}
};
std::mt19937 generator(std::random_device{}());
Circle RIA(std::span<Point> a) {
std::shuffle(a.begin(), a.end(), generator);
Circle min_circle = Circle{a[0], 0};
for (int64_t i = 1; i < static_cast<int64_t>(a.size()); i++) {
if (!min_circle.contains(a[i])) {
min_circle = Circle{a[i], 0};
for (int64_t j = 0; j < i; j++) {
if (!min_circle.contains(a[j])) {
min_circle = Circle::circumcircle(a[i], a[j]);
for (int64_t k = 0; k < j; k++) {
if (!min_circle.contains(a[k])) {
min_circle = Circle::circumcircle(a[i], a[j], a[k]);
}
}
}
}
}
}
return min_circle;
}
int main() {
int64_t n;
std::vector<Point> points;
std::cin >> n;
points.resize(n);
for (int64_t i = 0; i < n; i++) {
scalar_t x, y;
std::cin >> x >> y;
points[i] = Point{x, y};
}
auto calc = [](std::span<Point> a, Point basis_x, Point basis_y) {
std::vector<Point> transformed;
for (auto i : a) {
transformed.push_back(Point::linear_transform(i, basis_x, basis_y));
}
auto cir = RIA(transformed);
return std::make_pair(
cir, cir.area() / std::abs(Point::cross(basis_x, basis_y)));
};
Point basis_x{1, 0};
Point basis_y{0, 1};
scalar_t step = 1e9;
auto [circle, area] = calc(points, basis_x, basis_y);
std::uniform_real_distribution<double> uniform(-1, 1);
while (step > eps) {
Point new_basis_x{std::max(basis_x.x + uniform(generator) * step, eps),
basis_x.y + uniform(generator) * step};
Point new_basis_y = basis_y;
auto [new_circle, new_area] = calc(points, new_basis_x, new_basis_y);
if (area > new_area) {
circle = new_circle;
area = new_area;
basis_x = new_basis_x;
basis_y = new_basis_y;
}
step *= 0.999;
}
std::println("{{");
std::println(" \"points\": [");
for (auto it = points.begin(); it != points.end(); it++) {
std::print(" [{:.9f}, {:.9f}]", it->x, it->y);
if (it + 1 != points.end()) {
std::print(",");
}
std::println();
}
std::println(" ],");
std::println(" \"basis_x\": [{:.9f}, {:.9f}],", basis_x.x, basis_x.y);
std::println(" \"basis_y\": [{:.9f}, {:.9f}],", basis_y.x, basis_y.y);
std::println(" \"circle\": {{");
std::println(" \"center\": [{:.9f}, {:.9f}],", circle.center.x,
circle.center.y);
std::println(" \"radius\": {:.9f}", circle.radius);
std::println(" }},");
std::println(" \"ellipse_area\": {:.9f}", area);
std::println("}}");
}
datamaker.py
import random
n = 20
print(n)
for i in range(n):
print(random.uniform(-10, 10), random.uniform(-10, 10))
draw.py
import json
import numpy as np
import matplotlib.pyplot as plt
import sys
import random
import subprocess
def main():
try:
data = json.load(sys.stdin)
except json.JSONDecodeError as e:
print(f"Error decoding JSON: {e}")
sys.exit(1)
# 提取数据
points = np.array(data["points"])
basis_x = np.array(data["basis_x"])
basis_y = np.array(data["basis_y"])
circle = data["circle"]
center = np.array(circle["center"])
radius = circle["radius"]
# 构造变换矩阵 A (2x2)
# A 的列向量是基向量 basis_x 和 basis_y
A = np.column_stack((basis_x, basis_y))
# 计算逆变换矩阵 (A 的逆)
try:
A_inv = np.linalg.inv(A)
except np.linalg.LinAlgError:
print("Error: Transformation matrix is singular and cannot be inverted.")
sys.exit(1)
# 计算原始坐标系中的椭圆中心
origin_center = A_inv @ center
# 生成圆上的点(100个点)
theta = np.linspace(0, 2 * np.pi, 100)
circle_points = np.array([radius * np.cos(theta), radius * np.sin(theta)])
# 将圆上的点逆变换到原始坐标系 → 得到椭圆
# 公式: 椭圆点 = A_inv × (圆点) + 椭圆中心
ellipse_points = A_inv @ circle_points + origin_center[:, np.newaxis]
# 创建绘图
plt.figure(figsize=(10, 8))
# 绘制原始点(不需要变换)
plt.scatter(
points[:, 0],
points[:, 1],
color="red",
s=100,
marker="o",
label="Original Points",
zorder=5,
)
# 绘制椭圆
plt.plot(
ellipse_points[0, :],
ellipse_points[1, :],
"b-",
linewidth=2,
label="Transformed Ellipse",
)
# 添加图例和标题
plt.legend(loc="best", fontsize=12)
plt.title("Original Points and Transformed Ellipse", fontsize=14)
plt.xlabel("X", fontsize=12)
plt.ylabel("Y", fontsize=12)
plt.grid(True, linestyle="--", alpha=0.7)
plt.axis("equal") # 保持纵横比相等
# 优化布局
plt.tight_layout()
# 显示图形
plt.show()
if __name__ == "__main__":
main()
运行命令 python datamaker.py | ./min_ellipse_cover | python draw.py
最后感谢大佬围观。